【儀表網 研發快訊】近日,機電工程學院謝暉教授團隊在微型仿魚機器人群體協調與靶向藥物遞送方面取得重要進展,相關研究成果以《仿魚磁性軟體機器人的群體協調:面向高效藥物遞送的定點富集與形狀自適應貼附》(Swarm coordination of fish-like magnetic soft robots: directed aggregation and shape-adaptive attachment toward efficient drug delivery)為題發表在《國家科學評論》(National Science Review)上。相關成果有助于解決體內復雜三維環境中多發病灶的高效藥物遞送難題,并為微型機器人群體智能的實現提供新的技術路徑。
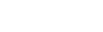
體內病變往往呈現多點散發、立體分布的特征,而單個微型機器人尺寸微小,難以覆蓋病變區域,限制了藥物遞送的效率。因此,需要通過群體協作彌合單個機器人與病變區域范圍之間的鴻溝。自然界中,魚群通過協同行為適應復雜環境,為解決這一問題提供了仿生學啟示(圖1)。洄游魚群通過動態聚散穿越復雜通道,覓食魚群則在特定區域調節形態以覆蓋目標。然而,要讓機器人在體內環境實現類似的群體協同行為卻面臨“如何在全局磁場下實現個體差異化控制”“如何調節機器人間的距離避免相互粘連”“如何使機器人群體自適應地貼附于不規則病灶”等諸多挑戰。
圖1 靈活的微型仿魚磁性軟機器人集群向病灶聚集并形狀自適應貼附
針對上述問題,研究團隊提出微型仿魚機器人的群體協調方法。研究人員設計了頭尾異質結構的微型機器人,通過激光加工實現高通量制備。該研究首次發現當驅動頻率接近機器人固有頻率時,振蕩磁場的恒定分量將完全主導游動方向。基于此發現,團隊通過編程恒定磁場分量的空間分布實現個體方向的差異化調控,通過調節交變磁場強度避免機器人相互粘連。機器人可實現全自由度運動,游動速度達每秒20體長。機器人群可在體內三維環境中主動聚散,如同洄游魚群;到達病灶后,可利用磁場與界面約束調節形態適應病灶輪廓,如同覓食魚群,實現自適應貼附。
團隊開展了豐富的體外驗證試驗。如圖2所示,單個機器人可完成三維物體搬運、逆流游動等任務。在胃部病灶模型中(圖3),機器人群成功實現了向病灶定向聚集、調節形態并穩定貼附。團隊還展示了機器人群在超聲成像引導下的運動控制、抗重力運動等能力。

圖2 仿魚微機器人個體搬運物體

圖3 仿生魚群向病灶聚集并主動調整形態貼附
哈工大機器人技術與系統全國重點實驗室為論文唯一單位。謝暉教授、孟祥和副教授、張號副教授為論文共同通訊作者,博士生毛立陽、田陳堯為論文共同第一作者,博士生楊鵬、沈行健為共同作者。該研究獲得國家重點研發計劃、國家自然科學基金等項目資助。


















所有評論僅代表網友意見,與本站立場無關。