【儀表網(wǎng) 研發(fā)快訊】協(xié)作機器人的高動態(tài)響應與柔順交互能力對于實現(xiàn)復雜環(huán)境下的精密作業(yè)至關重要。在沖擊鉚接、電阻點焊或精密軸孔裝配等應用場景中,機器人往往需要具備低阻尼、高剛度的阻抗特性以實現(xiàn)對環(huán)境的敏捷響應。然而,受制于模型不確定性和外部擾動,傳統(tǒng)的阻抗控制方法在面向低阻尼阻抗渲染需求時難以實現(xiàn)可靠力跟蹤,引發(fā)系統(tǒng)振蕩甚至失穩(wěn),限制了其在實際工業(yè)中的應用范圍。
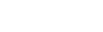
針對這一挑戰(zhàn),中國科學院寧波材料技術與工程研究所精密驅(qū)動與智能機器人技術團隊與英國利物浦大學楊辰光教授團隊合作提出了一種基于偏置滑模面(Biased Sliding Surface, BSS)的協(xié)作機器人自適應躍度控制(AJC)(圖1),有效解決了低阻尼阻抗渲染需求下的控制穩(wěn)定性難題。該方法首先通過接觸力反饋和復合運動誤差,實時表征力-位耦合特性的動態(tài)變化,構建了一種包含力沖量項的偏置滑模面,從而在欠阻尼的情況下也能準確估計力偏差;隨后,利用魯棒誤差積分策略對系統(tǒng)躍度進行調(diào)節(jié),實現(xiàn)了力偏差的指數(shù)衰減;在此基礎上,提出了一種基于力偏差范數(shù)的增益自適應律,實時動態(tài)調(diào)整滑模增益,抑制了控制信號的抖動,并有效避免了傳統(tǒng)方法中因速度誤差與力偏差方向相反導致的系統(tǒng)失穩(wěn)問題。
實驗驗證表明,該方法在處理快速時變環(huán)境交互任務時,相比現(xiàn)有技術在力跟蹤精度和接觸穩(wěn)定性方面具有顯著優(yōu)勢,并顯著擴大了阻抗參數(shù)的許用范圍。
相關成果以“Low-Damping Impedance Control of Cobot With Jerk Adaptation on Biased Sliding Surface”為題,發(fā)表在 IEEE Transactions on Industrial Electronics (《IEEE工業(yè)電子匯刊》)上(DOI:10.1109/TIE.2025.3634424)。以上工作得到了國家自然科學基金(U20A20282, U22A20177, U23A20616)、浙江省自然科學基金項目(LD24E050010)、浙江省“領雁”攻關計劃(2025C01018)和寧波市重大科技攻關項目(2023Z135)等項目的資助。
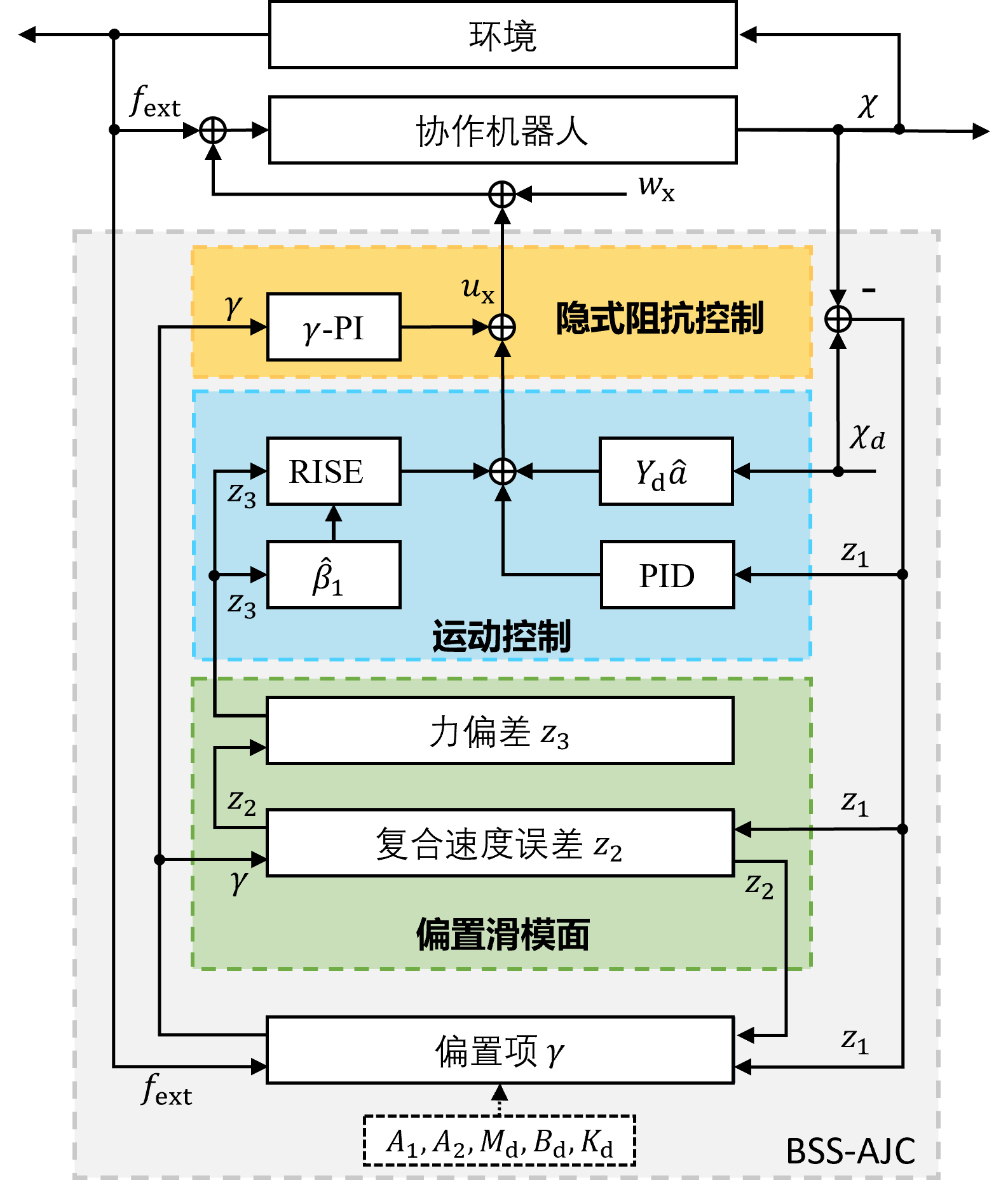
圖1:提出的控制流程圖
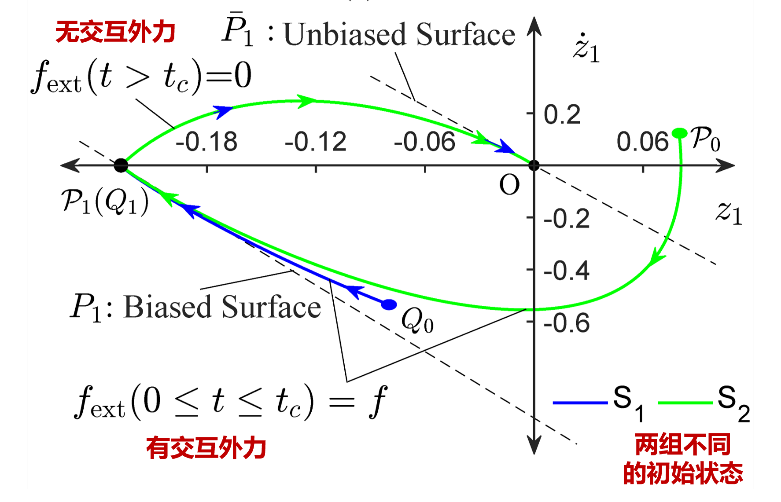
圖2. 偏置滑模面的軌跡相圖
圖3:力偏差分布。(a)-(c) 過阻尼的阻抗控制。(d)-(f) 欠阻尼的阻抗控制
(機器人與智能制造裝備技術實驗室)




















所有評論僅代表網(wǎng)友意見,與本站立場無關。